Docs
Micro-controllers, wireless transmission and database
NEMA 17 Motor & L298N with Blue Pill using STM32CubeIDE
Prerequisites
This project assumes you have already installed STM32CubeIDE. You need to have previously done a basic blink sketch with blue-pill using STM32CubeIDE. I have made a complete video from installing STM32CubeIDE to LED blink program. You can watch it by clicking this link. https://www.youtube.com/watch?v=kXg467nVd_A
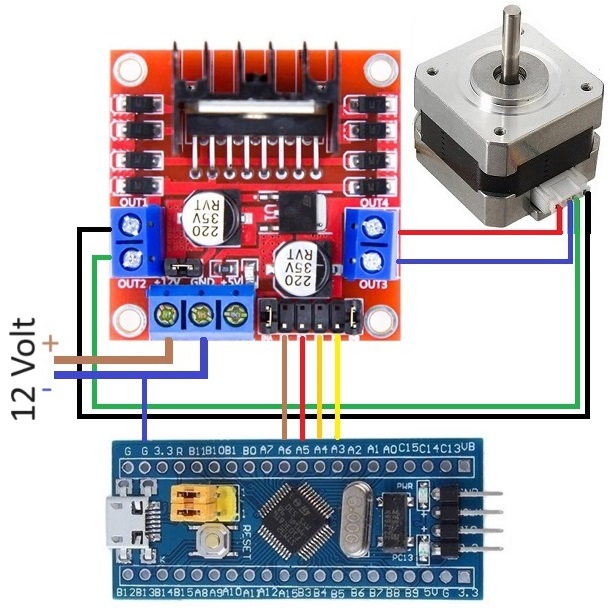
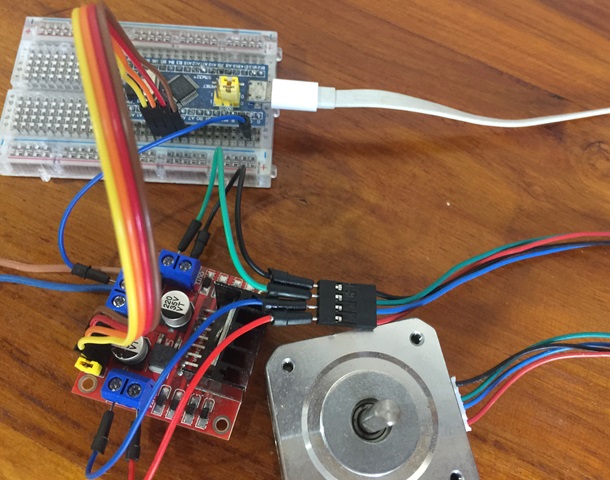
Wiring Diagram
STM32CubeIDE Settings
Click RCC → High Speed Clock (HSE) to Crystal/Ceramic Resonator
Click Clock Configuration tab → HCLK (MHz) to 72
Click Pinout and Configuration tab
Click Timer → Click TIM2 →
Clock Source set to Internal Clock
Configuration → Parameter Settings →
Prescaler set to 71
Set PA3, PA4, PA5 and PA6 GPIO_Output
Additional code on top of STM32CubeIDE generated code
/* USER CODE BEGIN 0 */ #define IN1_PIN GPIO_PIN_6 #define IN1_PORT GPIOA #define IN2_PIN GPIO_PIN_5 #define IN2_PORT GPIOA #define IN3_PIN GPIO_PIN_4 #define IN3_PORT GPIOA #define IN4_PIN GPIO_PIN_3 #define IN4_PORT GPIOA int stepNumber; // which step the motor is on void motorDelay(uint32_t delay) { if (delay < 60000) { __HAL_TIM_SET_COUNTER(&htim2, 0); while (__HAL_TIM_GET_COUNTER(&htim2) < delay); } else { HAL_Delay(delay/1000); } } void motorOn() { // Find out which step the motor is on switch (stepNumber) { case 1: HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_SET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_RESET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_RESET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_SET); // IN4 HAL_Delay(5); break; case 2: HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_SET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_RESET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_SET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_RESET); // IN4 HAL_Delay(5); break; case 3: HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_RESET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_SET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_SET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_RESET); // IN4 HAL_Delay(5); break; case 4: HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_RESET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_SET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_RESET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_SET); // IN4 HAL_Delay(5); break; default: break; } } void motorOff() { // Switch off the idle current to the motor // Otherwise L298N module will heat up HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_RESET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_RESET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_RESET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_RESET); // IN4 } void stepCV (int steps, float speed) // CV - Clockwise { uint32_t delay = 60*1000*1000/200/speed; for(int x=0; x<steps; x=x+1) { // Step to the next step switch (stepNumber) { case 1: HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_SET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_RESET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_SET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_RESET); // IN4 motorDelay(delay); stepNumber = 2; break; case 2: HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_RESET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_SET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_SET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_RESET); // IN4 motorDelay(delay); stepNumber = 3; break; case 3: HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_RESET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_SET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_RESET); // IN3 motorDelay(delay); stepNumber = 4; break; case 4: HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_SET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_RESET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_RESET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_SET); // IN4 motorDelay(delay); stepNumber = 1; break; default: break; } } } void stepCCV (int steps, float speed) // CCV - Counter Clockwise { uint32_t delay = 60*1000*1000/200/speed; for(int x=0; x<steps; x=x+1) { // Step to the previous step switch (stepNumber) { case 1: HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_RESET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_SET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_RESET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_SET); // IN4 motorDelay(delay); stepNumber = 4; break; case 2: HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_SET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_RESET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_RESET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_SET); // IN4 motorDelay(delay); stepNumber = 1; break; case 3: HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_SET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_RESET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_SET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_RESET); // IN4 motorDelay(delay); stepNumber = 2; break; case 4: HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_RESET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_SET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_SET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_RESET); // IN4 motorDelay(delay); stepNumber = 3; break; default: break; } } } /* USER CODE END 0 */ /* USER CODE BEGIN 2 */ HAL_TIM_Base_Start(&htim2); stepNumber = 1; /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { motorOn(); stepCV(200,150.0f); // Clockwise 200 steps 150 RPM motorOff(); HAL_Delay(2000); motorOn(); stepCCV(100,150.0f); // Counter Clockwise 100 steps 150 RPM motorOff(); HAL_Delay(2000); motorOn(); stepCV(7,0.5f); // Clockwise 7 steps 1/2 RPM motorOff(); HAL_Delay(2000); motorOn(); stepCCV(9,0.5f); // Counter Clockwise 9 steps 1/2 RPM motorOff(); HAL_Delay(2000); motorOn(); stepCV(1500,30.0f); // Clockwise 1500 steps 30 RPM motorOff(); HAL_Delay(2000); /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */