Docs
Micro-controllers, wireless transmission and database
Servo Motor with Blue Pill using STM32CubeIDE
Prerequisites
This project assumes you have already installed STM32CubeIDE. You need to have previously done a basic blink sketch with blue-pill using STM32CubeIDE. I have made a complete video from installing STM32CubeIDE to LED blink program. You can watch it by clicking this link. https://www.youtube.com/watch?v=kXg467nVd_A
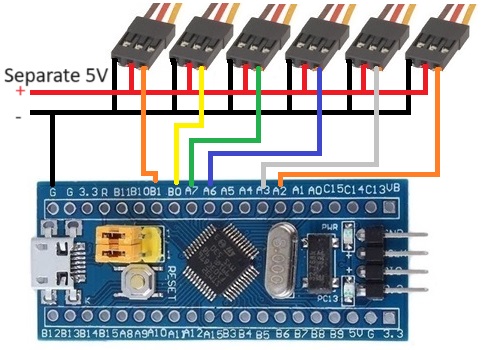
Wiring Diagram
STM32CubeIDE Settings
Click Timer → Click TIM2 →
Clock Source set to Internal Clock
Channel3 set to PWM Generation CH3
Channel4 set to PWM Generation CH4
Configuration → Parameter Settings →
Prescaler set to 15
Counter Period 9999
Click Timer → Click TIM3 →
Clock Source set to Internal Clock
Channel1 set to PWM Generation CH1
Channel2 set to PWM Generation CH2
Channel3 set to PWM Generation CH3
Channel4 set to PWM Generation CH4
Configuration → Parameter Settings →
Prescaler set to 15
Counter Period 9999
Additional code on top of STM32CubeIDE generated code
/* USER CODE BEGIN 2 */ HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_3); HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_4); HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1); HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_2); HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_3); HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_4); /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { __HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_3, 250); __HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_4, 450); __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1, 650); __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_2, 850); __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_3, 1050); __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_4, 1250); HAL_Delay(1000); __HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_3, 450); __HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_4, 650); __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1, 850); __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_2, 1050); __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_3, 1250); __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_4, 250); HAL_Delay(1000); __HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_3, 650); __HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_4, 850); __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1, 1050); __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_2, 1250); __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_3, 250); __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_4, 450); HAL_Delay(1000); __HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_3, 850); __HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_4, 1050); __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1, 1250); __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_2, 250); __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_3, 450); __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_4, 650); HAL_Delay(1000); __HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_3, 1050); __HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_4, 1250); __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1, 250); __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_2, 450); __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_3, 650); __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_4, 850); HAL_Delay(1000); __HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_3, 1250); __HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_4, 250); __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1, 450); __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_2, 650); __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_3, 850); __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_4, 1050); HAL_Delay(1000); /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */