Docs
Micro-controllers, wireless transmission and database
STM32 NEO-6M GPS
Prerequisites
This project assumes you have already installed STM32CubeIDE. You need to have previously done a basic blink sketch with blue-pill using STM32CubeIDE. I have made a complete video from installing STM32CubeIDE to LED blink program. You can watch it by clicking this link. https://www.youtube.com/watch?v=kXg467nVd_A
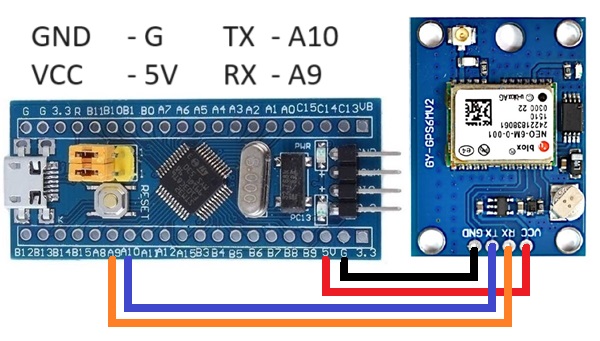
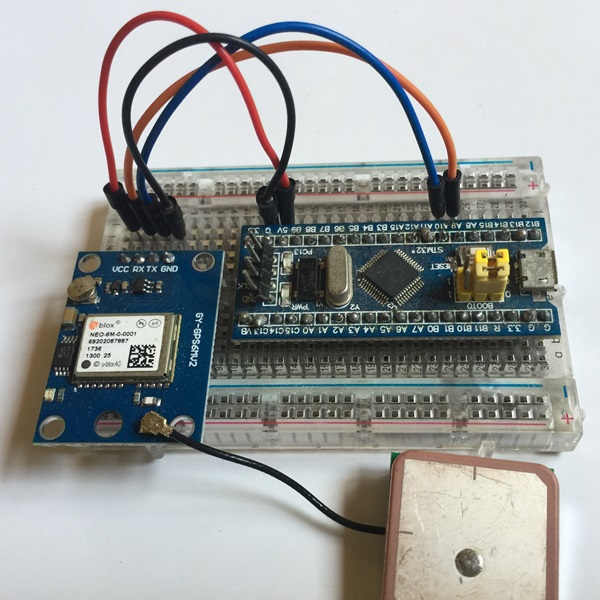
Wiring Diagram
STM32CubeIDE Settings
Enable USART1 asynchronous
Parameter Settings --> Basic Parameters --> Baud rate 9600
NVIC Settings --> USART1 global interrupt --> (Tick)
Additional code on top of STM32CubeIDE generated code
/* USER CODE BEGIN Includes */ #include <string.h> #include <stdio.h> /* USER CODE END Includes */ /* USER CODE BEGIN 0 */ uint8_t rxBuffer[128] = {0}; uint8_t rxIndex = 0; uint8_t rxData; float nmeaLong; float nmeaLat; float utcTime; char northsouth; char eastwest; char posStatus; float decimalLong; float decimalLat; float nmeaToDecimal(float coordinate) { int degree = (int)(coordinate/100); float minutes = coordinate - degree * 100; float decimalDegree = minutes / 60; float decimal = degree + decimalDegree; return decimal; } void gpsParse(char *strParse){ if(!strncmp(strParse, "$GPGGA", 6)){ sscanf(strParse, "$GPGGA,%f,%f,%c,%f,%c", &utcTime, &nmeaLat, &northsouth, &nmeaLong, &eastwest); decimalLat = nmeaToDecimal(nmeaLat); decimalLong = nmeaToDecimal(nmeaLong); } else if (!strncmp(strParse, "$GPGLL", 6)){ sscanf(strParse, "$GPGLL,%f,%c,%f,%c,%f", &nmeaLat, &northsouth, &nmeaLong, &eastwest, &utcTime); decimalLat = nmeaToDecimal(nmeaLat); decimalLong = nmeaToDecimal(nmeaLong); } else if (!strncmp(strParse, "$GPRMC", 6)){ sscanf(strParse, "$GPRMC,%f,%c,%f,%c,%f,%c", &utcTime, &posStatus, &nmeaLat, &northsouth, &nmeaLong, &eastwest); decimalLat = nmeaToDecimal(nmeaLat); decimalLong = nmeaToDecimal(nmeaLong); } } int gpsValidate(char *nmea){ char check[3]; char calculatedString[3]; int index; int calculatedCheck; index=0; calculatedCheck=0; // Ensure that the string starts with a "$" if(nmea[index] == '$') index++; else return 0; //No NULL reached, 75 char largest possible NMEA message, no '*' reached while((nmea[index] != 0) && (nmea[index] != '*') && (index < 75)){ calculatedCheck ^= nmea[index];// calculate the checksum index++; } if(index >= 75){ return 0;// the string is too long so return an error } if (nmea[index] == '*'){ check[0] = nmea[index+1]; //put hex chars in check string check[1] = nmea[index+2]; check[2] = 0; } else return 0;// no checksum separator found therefore invalid data sprintf(calculatedString,"%02X",calculatedCheck); return((calculatedString[0] == check[0]) && (calculatedString[1] == check[1])) ? 1 : 0 ; } void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { if(huart->Instance==USART1) { // if the character received is other than 'enter' ascii13, save the data in buffer if(rxData!='\n' && rxIndex < sizeof(rxBuffer)) { rxBuffer[rxIndex++]=rxData; } else { if(gpsValidate((char*) rxBuffer)) gpsParse((char*) rxBuffer); rxIndex=0; memset(rxBuffer,0,sizeof(rxBuffer)); } HAL_UART_Receive_IT(&huart1,&rxData,1); // Enabling interrupt receive again } } /* USER CODE END 0 */ /* USER CODE BEGIN 2 */ HAL_UART_Receive_IT(&huart1,&rxData,1); /* USER CODE END 2 */