Docs
Micro-controllers, wireless transmission and database
UART with STM8S103F3P6 using ST Visual develop IDE
Prerequisites
This project assumes you have already installed ST Visual develop IDE and Cosmic Compiler. You need to have previously done a basic blink sketch with STM8S103F3P6 using STVD. I have made a complete video from installing to LED blink program. You can watch it by clicking this link. https://www.youtube.com/watch?v=iFiBfx9vCqo
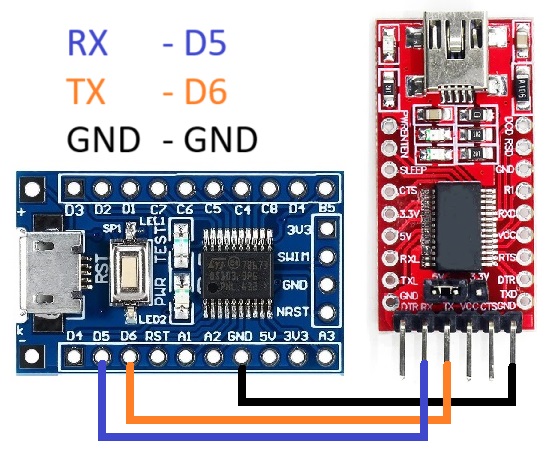
Wiring Diagram
Libraries
FROM STM8S/A Standard peripheral library
from https://www.st.com/en/embedded-software/stsw-stm8069.html
stm8s.h
stm8s_clk.h
stm8s_gpio.h
stm8s_uart1.h
stm8s_clk.c
stm8s_gpio.c
stm8s_uart1.c
main.c code
#include "stm8s.h" void delay_ms (int ms) // Milli second delay { int a =0 ; int b=0; for (a=0; a<=ms; a++) { for (b=0; b<120; b++) _asm("nop"); // Perform no operation } } void UART1_Print_String(char *a) { int i; for(i=0;a[i]!='\0';i++) { UART1_SendData8(a[i]); while( UART1_GetFlagStatus(UART1_FLAG_TXE) == RESET); } } // Can send from -99999 to 99999 void UART1_Print_Integer(signed long value) { char ch[7] = {0x20, 0x20, 0x20, 0x20, 0x20, 0x20, 0x00}; if(value < 0) // If negative number place "-" sign in front { ch[0] = 0x2D; value = -value; } else { ch[0] = 0x20; // If positive number place space sign in front } if(value > 9999) { ch[1] = ((value / 10000) + 0x30); ch[2] = (((value % 10000) / 1000) + 0x30); ch[3] = (((value % 1000) / 100) + 0x30); ch[4] = (((value % 100) / 10) + 0x30); ch[5] = ((value % 10) + 0x30); } else if((value > 999) && (value <= 9999)) { ch[1] = ((value / 1000) + 0x30); ch[2] = (((value % 1000) / 100) + 0x30); ch[3] = (((value % 100) / 10) + 0x30); ch[4] = ((value % 10) + 0x30); ch[5] = 0x20; } else if((value > 99) && (value <= 999)) { ch[1] = ((value / 100) + 0x30); ch[2] = (((value % 100) / 10) + 0x30); ch[3] = ((value % 10) + 0x30); ch[4] = 0x20; ch[5] = 0x20; } else if((value > 9) && (value <= 99)) { ch[1] = ((value / 10) + 0x30); ch[2] = ((value % 10) + 0x30); ch[3] = 0x20; ch[4] = 0x20; ch[5] = 0x20; } else { ch[1] = ((value % 10) + 0x30); ch[2] = 0x20; ch[3] = 0x20; ch[4] = 0x20; ch[5] = 0x20; } UART1_Print_String(ch); } main() { unsigned char inChar; signed long countUART = -250; GPIO_Init(GPIOB, GPIO_PIN_5, GPIO_MODE_OUT_PP_LOW_SLOW); UART1_DeInit(); UART1_Init(9600,UART1_WORDLENGTH_8D,UART1_STOPBITS_1,UART1_PARITY_NO, UART1_SYNCMODE_CLOCK_DISABLE,UART1_MODE_TXRX_ENABLE); UART1_Cmd(ENABLE); while (1) { if (UART1_GetFlagStatus(UART1_FLAG_RXNE) == SET) { inChar = UART1_ReceiveData8(); if (inChar == 'N') GPIO_WriteHigh(GPIOB, GPIO_PIN_5); if (inChar == 'Y') GPIO_WriteLow(GPIOB, GPIO_PIN_5); } UART1_Print_String("The value is : "); UART1_Print_Integer(countUART); countUART++; UART1_Print_String("\n"); delay_ms(300); } }