Docs
Micro-controllers, wireless transmission and database
FreeRTOS practical example with stepper motors using Blue Pill & STM32CubeIDE
Prerequisites
This project assumes you have already installed STM32CubeIDE. You need to have previously done a basic blink sketch with blue-pill using STM32CubeIDE. I have made a complete video from installing STM32CubeIDE to LED blink program. You can watch it by clicking this link. https://www.youtube.com/watch?v=kXg467nVd_A
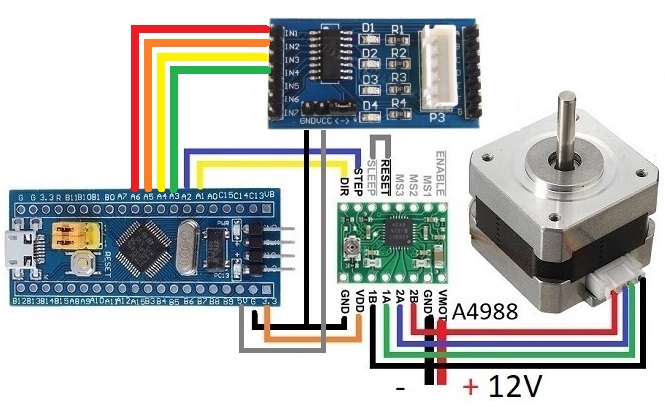
Wiring Diagram
STM32CubeIDE Settings
Click SYS → Timebase Source → Select any timers (TIM3)
Click RCC → High Speed Clock (HSE) to Crystal/Ceramic Resonator
Click Clock Configuration tab → HCLK (MHz) to 72
Click Pinout and Configuration tab
Click Middelware → Click FREERTOS → Select Interface to CMSIS_V1
Configuration → Advanced Settings → USE_NEWLIB_REENTRANT (Enabled)
Configuration → Tasks and Queues
Rename the DefaultTask to Motor1
Create another task named Motor2
Change Priority to osPriorityNormal for all tasks
Click Timer → Click TIM1 →
Clock Source set to Internal Clock
Configuration → Parameter Settings →
Prescaler set to 71
Click Timer → Click TIM2 →
Clock Source set to Internal Clock
Configuration → Parameter Settings →
Prescaler set to 71
Set PA1, PA2, PA3, PA4, PA5 and PA6 GPIO_Output
Additional code on top of STM32CubeIDE generated code
/* USER CODE BEGIN 0 */ #define DIR_PIN GPIO_PIN_1 // for motor1 #define DIR_PORT GPIOA // for motor1 #define STEP_PIN GPIO_PIN_2 // for motor1 #define STEP_PORT GPIOA // for motor1 #define IN1_PIN GPIO_PIN_6 // for motor2 #define IN1_PORT GPIOA // for motor2 #define IN2_PIN GPIO_PIN_5 // for motor2 #define IN2_PORT GPIOA // for motor2 #define IN3_PIN GPIO_PIN_4 // for motor2 #define IN3_PORT GPIOA // for motor2 #define IN4_PIN GPIO_PIN_3 // for motor2 #define IN4_PORT GPIOA // for motor2 // micro seconds delay for motor1 void microDelay1 (uint16_t delay) { __HAL_TIM_SET_COUNTER(&htim1, 0); while (__HAL_TIM_GET_COUNTER(&htim1) < delay); } // micro seconds delay for motor2 void microDelay2 (uint16_t delay) { __HAL_TIM_SET_COUNTER(&htim2, 0); while (__HAL_TIM_GET_COUNTER(&htim2) < delay); } // motor1 for both directions void step (int steps, uint8_t direction, uint16_t delay) { int x; if (direction == 0) HAL_GPIO_WritePin(DIR_PORT, DIR_PIN, GPIO_PIN_SET); else HAL_GPIO_WritePin(DIR_PORT, DIR_PIN, GPIO_PIN_RESET); for(x=0; x<steps; x=x+1) { HAL_GPIO_WritePin(STEP_PORT, STEP_PIN, GPIO_PIN_SET); microDelay1(delay); HAL_GPIO_WritePin(STEP_PORT, STEP_PIN, GPIO_PIN_RESET); microDelay1(delay); } } // CCV - Counter Clockwise motor2 void stepCCV (int steps, uint16_t delay) { for(int x=0; x<steps; x=x+1) { HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_SET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_RESET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_RESET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_RESET); // IN4 microDelay2(delay); HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_SET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_SET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_RESET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_RESET); // IN4 microDelay2(delay); HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_RESET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_SET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_RESET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_RESET); // IN4 microDelay2(delay); HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_RESET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_SET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_SET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_RESET); // IN4 microDelay2(delay); HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_RESET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_RESET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_SET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_RESET); // IN4 microDelay2(delay); HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_RESET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_RESET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_SET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_SET); // IN4 microDelay2(delay); HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_RESET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_RESET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_RESET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_SET); // IN4 microDelay2(delay); HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_SET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_RESET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_RESET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_SET); // IN4 microDelay2(delay); } } // CV - Clockwise motor1 void stepCV (int steps, uint16_t delay) { for(int x=0; x<steps; x=x+1) { HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_SET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_RESET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_RESET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_SET); // IN4 microDelay2(delay); HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_RESET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_RESET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_RESET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_SET); // IN4 microDelay2(delay); HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_RESET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_RESET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_SET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_SET); // IN4 microDelay2(delay); HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_RESET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_RESET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_SET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_RESET); // IN4 microDelay2(delay); HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_RESET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_SET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_SET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_RESET); // IN4 microDelay2(delay); HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_RESET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_SET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_RESET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_RESET); // IN4 microDelay2(delay); HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_SET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_SET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_RESET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_RESET); // IN4 microDelay2(delay); HAL_GPIO_WritePin(IN1_PORT, IN1_PIN, GPIO_PIN_SET); // IN1 HAL_GPIO_WritePin(IN2_PORT, IN2_PIN, GPIO_PIN_RESET); // IN2 HAL_GPIO_WritePin(IN3_PORT, IN3_PIN, GPIO_PIN_RESET); // IN3 HAL_GPIO_WritePin(IN4_PORT, IN4_PIN, GPIO_PIN_RESET); // IN4 microDelay2(delay); } } /* USER CODE END 0 */ /* USER CODE BEGIN 2 */ HAL_TIM_Base_Start(&htim1); HAL_TIM_Base_Start(&htim2); /* USER CODE END 2 */ void StartMotor1(void const * argument) { /* USER CODE BEGIN 5 */ /* Infinite loop */ for(;;) { for(int y=0; y<8; y=y+1) // 8 times { step(25, 0, 800); // 25 steps (45 degrees) CCV osDelay(500); } step(800, 1, 5000); // 800 steps (4 revolutions ) CV osDelay(1000); } /* USER CODE END 5 */ } void StartMotor2(void const * argument) { /* USER CODE BEGIN StartMotor2 */ /* Infinite loop */ for(;;) { // 512 full rev & 1 rpm - 14648 stepCV(256, 1000); // 256 half revolution osDelay(100); stepCCV(128, 1000); // 128 quarter revolution osDelay(100); } /* USER CODE END StartMotor2 */ }